
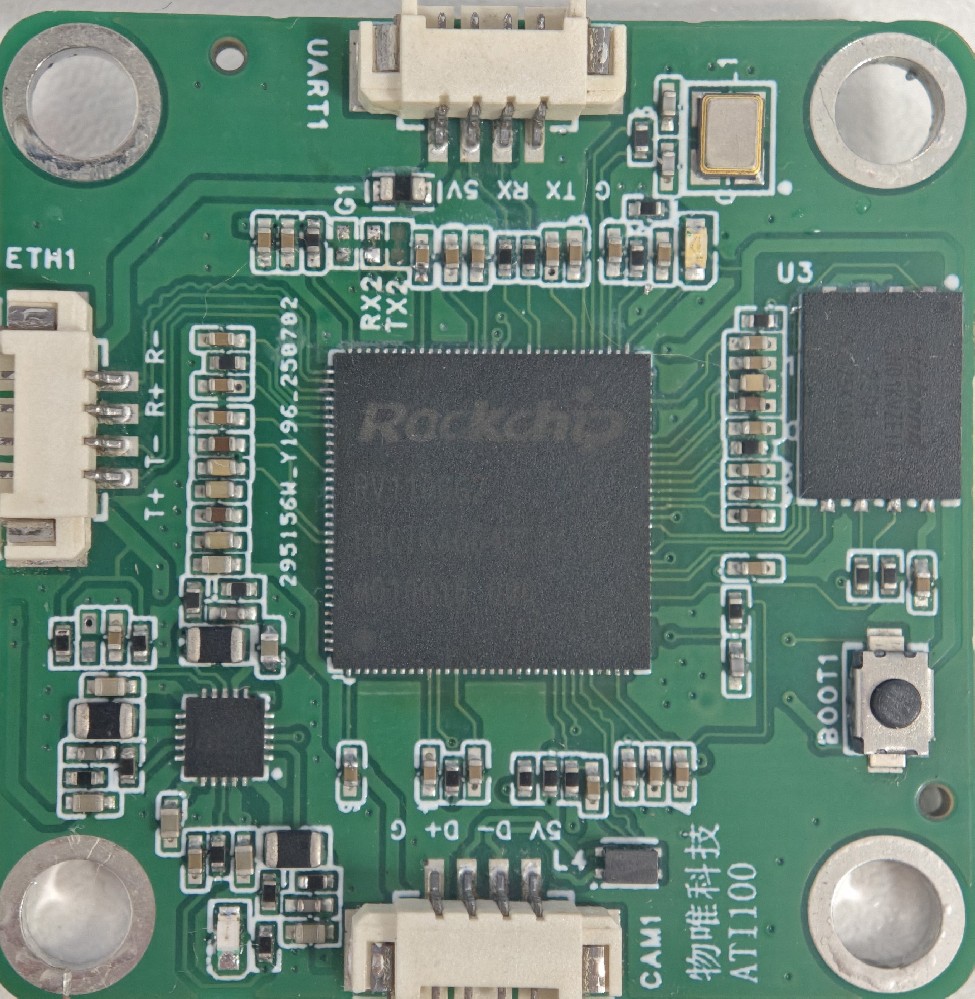
ATI100車(chē)牌識别模塊
VIEW MORE+
産品展示
新聞資訊
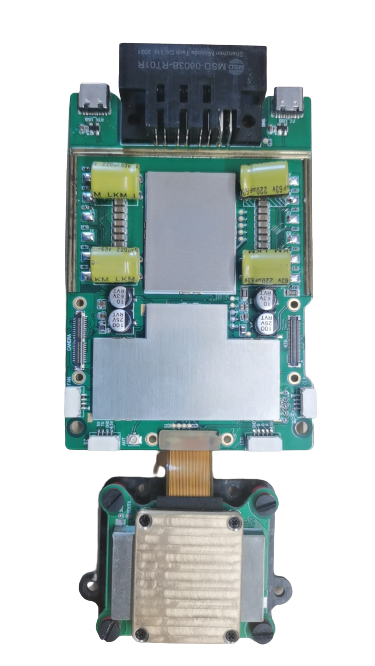
FC100無人(rén)機(jī)航電(diàn)系統
FC100無人(rén)機(jī)航電(diàn)系統是(shì)一(yī)款專為(wèi)中型行(xíng)業(yè)級四旋翼無人(rén)機(jī)打造的(de)一(yī)體(tǐ)化(<huà)飛(fēi)控解決方案。系統 100 % 兼容 APM 官方固件(jiàn) 二次開(kāi)發,并內(nèi)置物(wù)唯科(kē)技(jì)自(zì)研 WuWei-FC 源碼 與 Edge-Link 協同 SDK,可(kě)實現(xiàn)飛(fēi)行(xíng)控制(zhì)、任務規劃與 AI 感知(zhī)閉環協同。标配 10 Ah / 12 S 智能(néng)電(diàn)池,典型巡航電₹(diàn)流 ≈ 9.5 A,單電(diàn)池續航約 50 min。
産品詳情
核心優勢
| 模塊 | 關鍵特性 | 技(jì)術(shù)亮(liàng)點 |
|---|---|---|
| APM 兼容 | 原生(shēng)支持 Mission Planner / QGroundControl | 一(yī)鍵編譯、在線 OTA,社區(qū)資源豐富 |
| 定制(zhì)飛(fēi)控內(nèi)核 | WuWei-FC(基于 ArduCopter 分(fēn)支) | 500 Hz 姿态內(nèi)環,冗餘 EKF3,抗風(fēng)懸停 ±0.3 m |
| 邊緣協同 | Edge-Link SDK | 千太網直連 RK3588/Orin,MAVLink2 ↔ ROS 2 橋接 |
| 續航表現(xiàn)(W100) | 50 min(4 旋翼 / 9.5 A 巡航) | 單電(diàn)池作(zuò)業(yè)輕量化(huà),雙電(diàn)池熱(rè)備 ≥ 90 min |
| 開(kāi)放(fàng)二開(kāi) | HAL/Driver 文(wén)檔 + C++/Python API | 支持 AI 目标引導、編隊、自(zì)主巡檢等高(gāo)級任務 |
技(jì)術(shù)規格
| 分(fēn)類 | 指标 | 數(shù)值 |
|---|---|---|
| 飛(fēi)控處理(lǐ)器(qì) | WFC01 | 1 MB SRAM + 2 MB Flash |
| IMU 組合 | 雙 ICM-42688-P(6 DoF) + RM3100 三軸磁羅盤 | 雙冗餘硬件(jiàn)防振 |
| GNSS | UM982(國(guó)産) | GPS / BDS / Galileo / GLONASS |
| 接口 | CAN 2×、UART 4×、Ethernet 100 M、USB-C、PWM 8× | UAVCAN v1 / MAVLink2 |
| 電(diàn)池 | 12 S Li-ion 10 Ah | 集成 BMS,支持快(kuài)充 |
| 續航 | ≈ 50 min | 巡航電(diàn)流 9.5 A |
典型應用(yòng)場(chǎng)景
輸電(diàn)/風(fēng)電(diàn)塔架巡檢
應急搜救與消防偵察
智慧城(chéng)市(shì)上(shàng)空(kōng)安防
農(nóng)林(lín)病蟲害監測與噴灑
開(kāi)發者支持
完整 BSP:WFC 開(kāi)源倉庫、APM Patch、SITL/HIL 鏡像
Edge-Link SDK:C++ / Python / ROS 2 API,快(kuài)速調用(yòng)邊緣 AI 結果
工(gōng)具鏈:地(dì)面站(zhàn)插件(jiàn)、日(rì)志(zhì)解析器(qì)、性能(néng) Profiling 腳本
技(jì)術(shù)服務:遠(yuǎn)程調試、參數(shù)整定培訓、12 個(gè)月(yuè)核心支持
依托對(duì) APM 生(shēng)态的(de)深度兼容、物(wù)唯自(zì)研高(gāo)頻(pín)控制(zhì)算(suàn)法及與高(gāo)算(suàn)力邊緣平台的(de)₽無縫對(duì)接,幫助集成商與開(kāi)發者在最短(duǎn)時(shí)間(jiān)內(nèi)完成從(cóng)“可(kě)靠飛(fēi)行(xíng)”到(dào)“智能(néng)任務γ”的(de)升級。
産品詢價
- 上(shàng)一(yī)篇:空(kōng)中目标識别算(suàn)法及算(suàn)力解決方案
- 下(xià)一(yī)篇:沒有(yǒu)了(le)!
相(xiàng)關産品
-
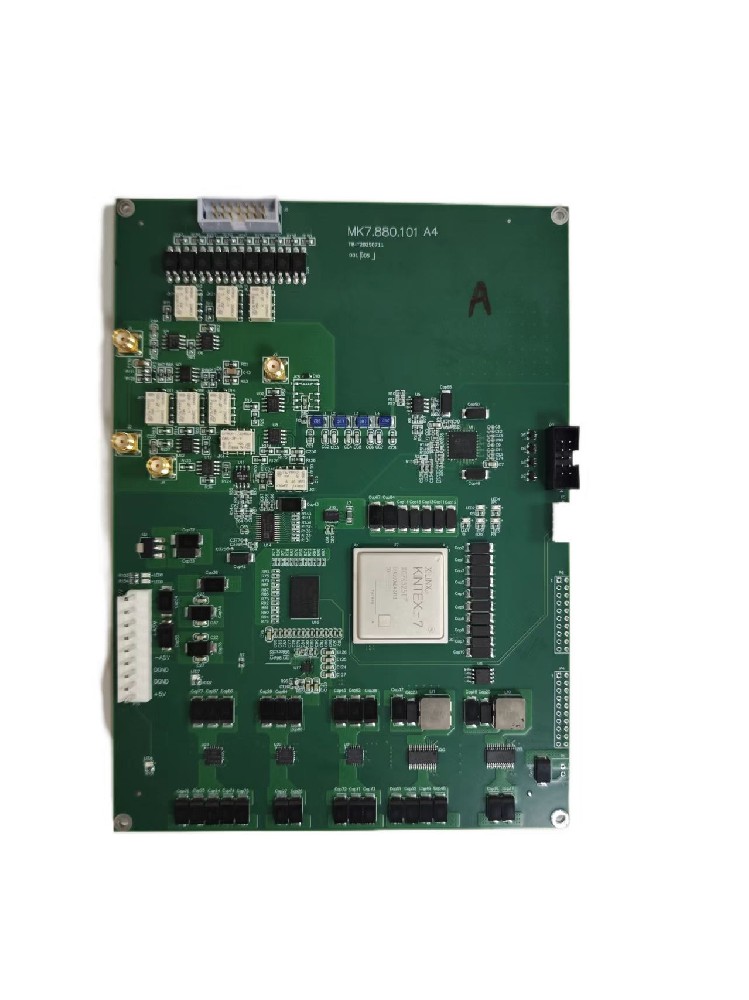
信号濾波采集闆卡 WW6104T
VIEW MORE+ -
-
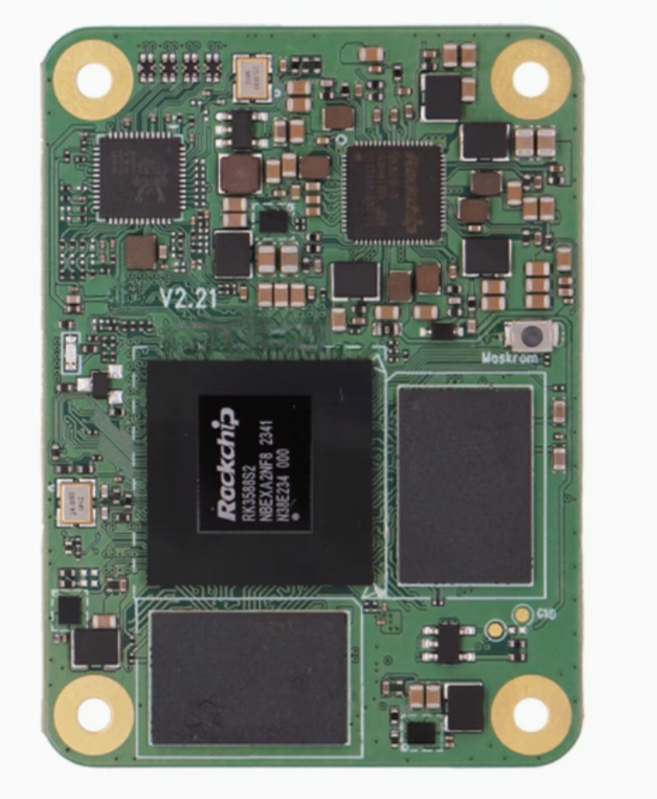
物(wù)唯RK3588S計(jì)算(suàn)平台
VIEW MORE+
- 産品展示 家(jiā)庭機(jī)器(qì)人(rén) 無人(rén)機(jī) 智能(néng)标注訓練平台 邊緣計(jì)算(suàn)模塊 特種芯片及模組
- 聯系我們 在線留言
- 關于我們 公司簡介

企業(yè)微(wēi)信
18722872326 服務咨詢熱(rè)線
Copyright © 2024 廣州市天工開物科技有限公司 京ICP證000000号 在線文(wén)檔